Martes, 17 de Mayo del 2016
Operaciones con funciones vectoriales. Con las funciones vectoriales que fueron vistas en la clase 6, se puede hacer operaciones, las cuales serán explicadas a continuación.

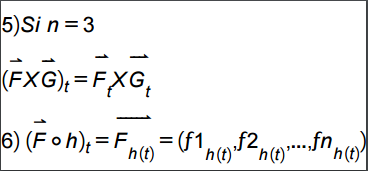
En las funciones vectoriales también se puede calcular limites, continuidad y sus respectivas derivadas. Todo según lo conocido en funciones de 1 variable. Lo único que se debe realizar es el proceso típico para cada uno de sus componentes. Teniendo en cuenta lo siguiente:
- Existe el limite de una función vectorial si y solo si existe el limite en cada una d sus componentes.
- El resultado de la aplicación del limite será un vector.
- Una función vectorial es continua en un intervalo [a,b] si y solo si cada una de sus componentes es continua en el mismo intervalo.